用語解説
GPS
GPS(Global Positioning System)
日本語では「汎地球測位システム」や「全地球測位システム」と呼ばれていましたが、最近では「GPS」で通用するようになりました。
GPSは、宇宙空間に配置されたGPS衛星から送られる電波を地上のアンテナで受信し、アンテナの位置を求める測位方法です。測量作業の他にカーナビやハンディGPS(登山などに使用)等々に利用されています。
GPSは、宇宙空間に配置されたGPS衛星から送られる電波を地上のアンテナで受信し、アンテナの位置を求める測位方法です。測量作業の他にカーナビやハンディGPS(登山などに使用)等々に利用されています。
GPS衛星
高度2万kmに6つの軌道を描く計24個(1軌道に4基)のGPS衛星が配置されています。
現在、我々が利用しているGPS衛星は米国のものですが、他にもロシア版GPS(GLONASS)や欧州版GPS(Galeleo)の運用・計画があり、近い将来にはこれらの利用も可能になります。
現在、我々が利用しているGPS衛星は米国のものですが、他にもロシア版GPS(GLONASS)や欧州版GPS(Galeleo)の運用・計画があり、近い将来にはこれらの利用も可能になります。
GPS衛星からの電波
GPS衛星からは、L1帯(1575.42MHz)とL2帯(1227.6MHz)のマイクロ波が送信されています。
この電波には、衛星の位置情報やC/Aコード、Pコードと呼ばれる様々な情報が乗っており、搬送波と呼ばれています(情報を運ぶための電波の意味)。
計測原理
GPSによる測量は「衛星を使った三角測量」といえます。
各衛星のその時々の位置は送信電波に記述されていますから既知です。また、GPS衛星と地上受信機には時計が搭載されているので衛星からの電波が受信機に達するまでに要した時間がわかり、時間Δt×電波速度(光速)で、衛星と受信機間の距離が算出できます。
したがって、受信機の座標(X,Y,Z)は3個の衛星から電波を受信すれば、三角測量で求めることができます。
ただし、実際には時計にも誤差があるので未知数は(X,Y,Z,t)の4つとなり、4個の衛星から電波を受信する必要があります。
各衛星のその時々の位置は送信電波に記述されていますから既知です。また、GPS衛星と地上受信機には時計が搭載されているので衛星からの電波が受信機に達するまでに要した時間がわかり、時間Δt×電波速度(光速)で、衛星と受信機間の距離が算出できます。
したがって、受信機の座標(X,Y,Z)は3個の衛星から電波を受信すれば、三角測量で求めることができます。
ただし、実際には時計にも誤差があるので未知数は(X,Y,Z,t)の4つとなり、4個の衛星から電波を受信する必要があります。
GPS計測の種類
単独測位
単独測位は、1つの受信機で同時に4個以上のGPS衛星からの電波を受信し、各衛星からの距離を算出して測位する方法です。
距離の算出にはGPS衛星から送信される搬送波に乗ったC/AコードやPコードを利用します。測位精度は概ね数10m程度です。
距離の算出にはGPS衛星から送信される搬送波に乗ったC/AコードやPコードを利用します。測位精度は概ね数10m程度です。
C/Aコードは300kmのコード長で1msec周期で繰り返すため、それを受信するGPS受信機と衛星間のC/Aコーは、ある瞬間ではこのようになる。
このことから、衛星との距離の概略値が300km以上の精度で予め分かっていないと多くの解がでてしまう。
ただ、地上や航空機では自分の位置はこの程度の範囲で概略の見当がつくので混乱することはない。
相対測位
複数の受信機で4個以上のGPS衛星を同時に観測して受信機間の相対的な位置関係を計測する方法で、単独測位より高精度です。
相対測位には、複数の受信機で単独測位を行ってそれぞれの位置情報から相対位置を求めるDGPSと、複数の受信機と衛星との距離の差(行路差)を搬送波の位相により求め、受信機間の相対位置を決定する干渉測位があります。
一般的にDGPSより干渉測位の方が高精度です。
相対測位には、複数の受信機で単独測位を行ってそれぞれの位置情報から相対位置を求めるDGPSと、複数の受信機と衛星との距離の差(行路差)を搬送波の位相により求め、受信機間の相対位置を決定する干渉測位があります。
一般的にDGPSより干渉測位の方が高精度です。
干渉測位
2つの受信機からある衛星までの距離の差(行路差)を搬送波の位相を使ってもとめ、基線ベクトルを決定する計測方法です。したがって、受信機ではそれぞれの搬送波の位相角を測定することになります。
干渉測位は、GPS測位の中で最も精度の良い方法で、mm単位の計測も可能です。
干渉測位は、GPS測位の中で最も精度の良い方法で、mm単位の計測も可能です。
スタティック測位
静的干渉測位ともいいます。干渉測位では、搬送波波長の整数個N(整数値バイアス)を決定する必要があります。
スタティック測位では、複数の受信機で4個以上の衛星を長時間観測し、衛星の時間的位置変化を利用して整数値バイアスを決定します。したがって、計測には概ね1時間以上の観測時間を要しますが、精度は最も良い計測手法です。
shamen-net.comでは、多くの場合、高精度なスタティック測位を採用しています。
スタティック測位では、複数の受信機で4個以上の衛星を長時間観測し、衛星の時間的位置変化を利用して整数値バイアスを決定します。したがって、計測には概ね1時間以上の観測時間を要しますが、精度は最も良い計測手法です。
shamen-net.comでは、多くの場合、高精度なスタティック測位を採用しています。
RTK(リアルタイムキネマティック)測位
誤差要因
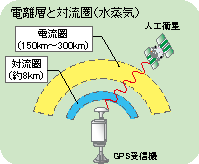
GPS計測のデータは、様々な誤差要因 によりバラツキます。誤差要因を列挙すると下記のようになります。特に、斜面や山地でのGPS計測では上空視通状態が悪く計測精度が悪化するとことがあります。
【伝搬遅延】
1
電離層の影響(電子密度は昼前後極大で深夜極小、夏至に高く冬至に低い)
2
水蒸気の影響(夏と冬、昼と夜で水蒸気量が周期的に変化)
3
気圧の影響(気圧変化5mbで伝搬遅延1cm)
4
衛星配置(低角度の場合)
【ノイズ】
1
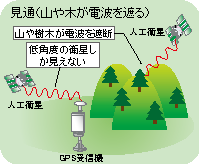
上空視通の問題(データ数が少ない)
2
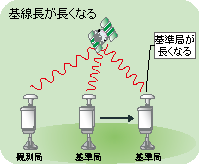
基線長が長くなる
3
多重反射(マルチパス)
4
超高圧送電線や雷
5
アンテナケーブルのくびれやくぼみ
6
ケーブルとコネクターの接続不良
仮想基準点方式とは
仮想基準点方式は、複数の基準点の観測データから求めるポイントの近傍にあたかも基準点があるかのような状態を作り出す技術である。
この方式の特徴は、計測区域近傍に基準点がなくても1台の移動局GPS受信機のみでスタティク測位と同程度(2〜3cm)の観測が行えることである。
また観測方法により、リアルタイム計測と後処理計測が可能である。
この方式の特徴は、計測区域近傍に基準点がなくても1台の移動局GPS受信機のみでスタティク測位と同程度(2〜3cm)の観測が行えることである。
また観測方法により、リアルタイム計測と後処理計測が可能である。
ガリレオ衛星
ヨーロッパのEUで計画されている独自の衛星航行システムです。GPSと同じようなシステムですが、当初から民間への利用目的で計画されている点が大きく異なっています。
GPSと同じように無料で使用できるサービスと、有料だが信頼性を保証するサービスを設けているのも特徴です。
ヨーロッパ向けのサービスですが、GPSと同じように受信機さえあれば、日本でも利用できるようになります。精度は現在のGPSと同等かそれ以上を目指しています。
運用は2008年にフル稼働という計画です。しかし、世界的な不況から資金面でかなり難航しており、今後の動向が注目されます。
GPSと同じように無料で使用できるサービスと、有料だが信頼性を保証するサービスを設けているのも特徴です。
ヨーロッパ向けのサービスですが、GPSと同じように受信機さえあれば、日本でも利用できるようになります。精度は現在のGPSと同等かそれ以上を目指しています。
運用は2008年にフル稼働という計画です。しかし、世界的な不況から資金面でかなり難航しており、今後の動向が注目されます。
準天頂衛星
準天頂衛星システムは、複数の衛星を用いて、少なくとも常時1機が日本の天頂付近に見えるように配置する衛星システムです。
静止衛星では斜めから電波が降ってきますが、準天頂衛星ではほぼ真上から電波が届きます。そのため、このシステムを用いると、ビルや山などの障害物の影響を少なくすることが可能となり、移動体向けの通信・放送サービスに有効であると考えられています(図1)。また、GPS(全地球測位システム)の機能を向上させるシステムとして、測位可能時間、精度の改善なども期待されています。
[図1 準天頂衛星システム]
北斗衛星
中国も北斗(Beidou Navigation System)という独自の衛星航行システムを計画しています。2000年に試験衛星を打ち上げ、静止軌道上に載せたのですが、詳細については公表されておりません。今後、さらにシステムを拡充し、次世代衛星航行システムとしていきたいという計画もあるようですが、具体的な内容、計画については発表されていません。
rinex
Receiver Independent Exchange format(受信機に独立な交換フォーマット)の略。
異なるGPS受信機、ソフトウェア会社間のGPSデータの交換のために使用される標準フォーマット。フォーマットは3つの基本的なGPSの観測値である、時刻、位相と距離を含んでいます。
RINEXフォーマットの完全な説明はCommission VIII International Coordination of Space Techniques for Geodesy and Geodynamics GPS Bulletin, May-June 1989に記載されています。
異なるGPS受信機、ソフトウェア会社間のGPSデータの交換のために使用される標準フォーマット。フォーマットは3つの基本的なGPSの観測値である、時刻、位相と距離を含んでいます。
RINEXフォーマットの完全な説明はCommission VIII International Coordination of Space Techniques for Geodesy and Geodynamics GPS Bulletin, May-June 1989に記載されています。
基線解析x
観測点間の幾何学的な位置関係を求める計算を基線解析という。
観測点が2点であれば2点間を結ぶ直線(基線ベクトル)の長さと方向を求める。
観測点が多い場合には、複数の観測点の間を基線で結んでできる測地網の形状、大きさ、方向を三次元的に求める。
観測点が2点であれば2点間を結ぶ直線(基線ベクトル)の長さと方向を求める。
観測点が多い場合には、複数の観測点の間を基線で結んでできる測地網の形状、大きさ、方向を三次元的に求める。
UTC
一般的にGPS測位ではUTC(Coordinated Universal Time 協定世界時)を用いている。
UTCは原子時系であり、英国グリニッジにおける平均太陽時の世界時(Universal Time, UT)との地球の自転が減速しているために起こる時計のずれを1秒以内に抑えるように工夫された時系である。世界時が地球回転に準拠しているのに対し、協定世界時は地球回転と原子時との妥協的な時系であるといえる。
協定世界時は閏秒を修正しているので、その修正を行わないGPS時とは10数秒の差がある。
また、日本中央標準時(Japan Standard Time, JST)は、協定世界時と+9時間の時差がある。
UTCは原子時系であり、英国グリニッジにおける平均太陽時の世界時(Universal Time, UT)との地球の自転が減速しているために起こる時計のずれを1秒以内に抑えるように工夫された時系である。世界時が地球回転に準拠しているのに対し、協定世界時は地球回転と原子時との妥協的な時系であるといえる。
協定世界時は閏秒を修正しているので、その修正を行わないGPS時とは10数秒の差がある。
また、日本中央標準時(Japan Standard Time, JST)は、協定世界時と+9時間の時差がある。
精密歴と放送歴
衛星の位置をGPS受信機で計算するため、軌道要素が衛星から常時放送されているが(これを放送歴という)、長距離を高精度で求める基準点測量等では、放送歴の精度だけでは充分でないので、衛星軌道追跡網を設け精密な軌道を決定している。これを精密歴という。
最近ではいろいろな機関がGPS衛星の精密歴を計算している。国際測地学協会(IAG)が主催する国際GPS事業(IGS)のIGS歴などがその代表である。だたし精密歴の計算には、軌道情報取得後約2週間程度を要する。
最近ではいろいろな機関がGPS衛星の精密歴を計算している。国際測地学協会(IAG)が主催する国際GPS事業(IGS)のIGS歴などがその代表である。だたし精密歴の計算には、軌道情報取得後約2週間程度を要する。
L5帯(L5band)
アメリカが2005年からBlock ?F衛星に新しい測位用の電波(L5帯)を追加する。
帯域は1164〜1215MHzが予定されている。
帯域は1164〜1215MHzが予定されている。
GPS気象学
GPS気象学とは、GPS大気遅延量データから時間分解能の高い水蒸気量を精度良く測定し、これを気象学(主に集中豪雨の予測など)に応用するものである。
サイクルスリップ
衛星からの電波が障害物などで遮断されると位相測定が中断する。そのため、その間の整数部の繰り上がり、繰り下がりが分からなくなる。この中断前後で位相の整数部分に整数部だけの不確定が生じる。これをサイクルスリップという。
この対処として、ベースラインの処理時に整数値のあいまいさを再度推定する必要がある。
この対処として、ベースラインの処理時に整数値のあいまいさを再度推定する必要がある。
キネマテック測量
キネマテック測量とは、基準点に基準局GPSを設置し、もう1機のGPSで連続しながら計測していく方法である。測位の原理は、短い観測時間でGPSの搬送波の位相による測量を行う方法である。この方法は短い観測時間で効率的な測量が可能であるが、その反面高いPDOP、マルチパス、そして衛星の受信中断の影響を受けやすくなっている。
マルチパス量
水平線に近い低高度角衛星の電波は、地球の大気のなかを長距離的に通過してくるので、伝搬誤差が多くなりがちである。また電波が地物にあたって反射したものが一緒にさせることがある。これらの誤差要因をマルチパスという。
マルチパスによる反射波は、衛星からの直接波よりも長い経路を通ってくるために、コードの到達時間の遅れ、搬送波位相の遅れ、受信強度の変動を生じる。
マルチパスによる反射波は、衛星からの直接波よりも長い経路を通ってくるために、コードの到達時間の遅れ、搬送波位相の遅れ、受信強度の変動を生じる。
RMS
Root Mean Square(平均の自乗和の平方根)。地点の測定値の精度を表現するために使われまる。なかに位置の固定の約70% が存在する誤差の円の半径のことである。距離の単位または波長のサイクルによって表現することができる。
SA
Selective Availability(セレクティブ アベイラビリティ)。米国の国防総省による特権のない(民間の)受信機によって計算された単独測位の位置精度を制限するプログラム。セレクティブアベイラビリティはGPS衛星のC/Aコードに誤差を与えることによって行われている。セレクティブアベイラビリティが行われている場合、単独測位の水平座標は2D RMSで100m以内の誤差がある。
Epoch
観測の行われる測定の間隔またはデータの周期。スタテック測位では、通常データを30秒毎に取得し、1時間(119 Epoch)で基線解析をする。
時刻同期
GPSの利用のなかには、時刻同期もある。その精度は数10nsである。通常はL1帯、C/Aコードで利用される。
C/Aコード(Coarse/Acuisition Code
GPS衛星のL1信号に変調されているコード。このコードは1,023の1と0がランダムな列で並んでおり、1.023MHzのチップ・レートで、1ミリ秒で繰り返される擬似ランダム雑音(PRN)。コードは捕捉しやすい特性を持っている。
Pコード(P-code)
Precise code(精密コード)またはProtected code(保護されたコード)。NAVSTAR衛星から放送されるコード、そして衛星の信号の遅れ、そして擬似距離を決めるためにGPS受信機によって使用される。
PコードはGPSの搬送波上に非常に長い(約1,014ビット)バイフェーズ変調した擬似ランダムのバイナリーのデータです。チップレートは10.23MHzで、38週間後に繰り返されます。各衛星はこのコードの独自の1週間の部分を使用しています。
PコードはGPSの搬送波上に非常に長い(約1,014ビット)バイフェーズ変調した擬似ランダムのバイナリーのデータです。チップレートは10.23MHzで、38週間後に繰り返されます。各衛星はこのコードの独自の1週間の部分を使用しています。
Yコード(Y-code)
Pコードに含まれる情報を暗号化したもの。