GNSSセンサ(スタティック/RTK測位法)
概要
現地に設置したGNSSセンサについて、24時間365日稼働の監視センターで、 GNSS計測データをリアルタイムで配信・監視するサービスです。弊社独自の各種誤差処理手法を用いることで、 最高で約1mm~2mm程度の変位を検出することが可能です。 有人監視の高精度・高品質サービスから、機械監視の手軽なサービスまで、最適なモニタリングサービスが選択できます。 また、測位方法もスタティック測位法、RTK測位法を現場条件や目的に合わせて選択可能です。
- 防災監視システム(特許第3745280号)
- 防災情報配信サーバ及びこのサーバとともに用いられる防災配信システム(特許第3742346号)
- 母集団移動平均誤差処理手法(特許第5915916号)
- 恒星日差分誤差処理手法(特許第6644970号)
課題(ニーズ)
- ミリメートル単位の高精度な監視を行いたい
- 遠隔地を連続的に観測・監視したい
- 夜間・悪天候時も含め、常時観測したい
- 変位を検知した際に警報を出してほしい
- 道路斜面や地すべり・崩壊などの土砂移動現象を監視したい
- 災害の予兆につながる微細な土砂移動を把握したい
- 夜間・休日も含めた24時間365日の連続監視を行いたい
- 観測結果をいつでもどこでも閲覧したい
- インフラ構造物等の維持管理のため中・長期的に観測したい
サービス

利用シーン
- 地すべりブロックの動態観測
- 大規模土砂災害の移動土塊観測・背後への拡大監視
- 高層建築物の施工時の精度管理
- 保全対象への影響監視
- 道路のり面や鉄塔基礎の計測監視
- フィルダム、コンクリートダムの外部変形計測・監視
- トンネル掘削時の坑口地すべり監視
- トンネル掘削時の小土被り部の沈下計測・監視
- 切土、盛土、露天掘り鉱山残壁など土工事の斜面計測
- 鉄道の近接施工時の計測監視
- PC高架橋の張出架設時の上げ越し管理
特徴
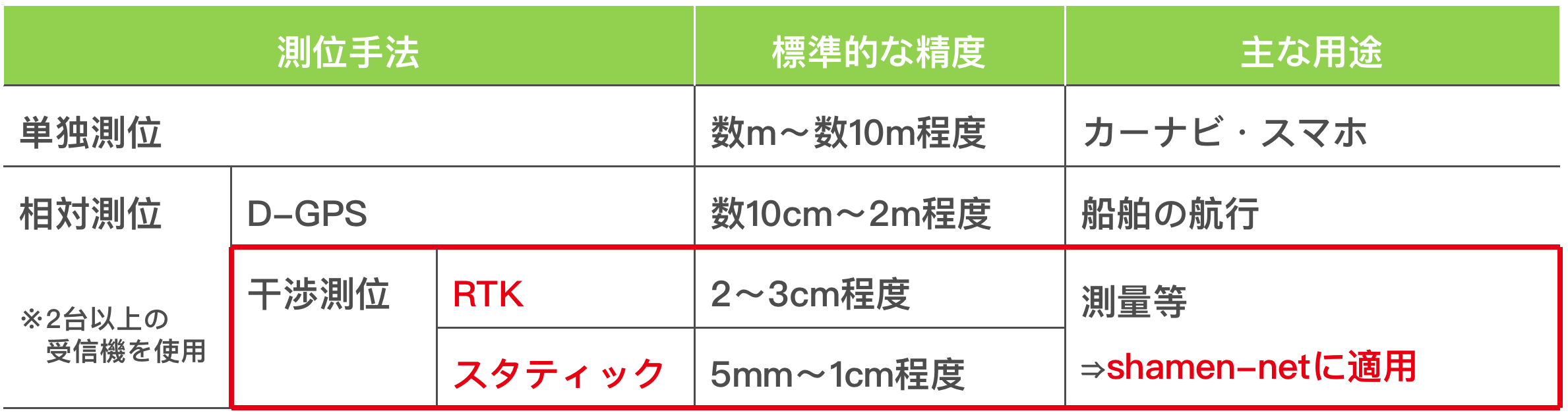
① GNSS計測はスタティック測位法およびRTK測位法に対応
地すべりやインフラ構造物等を対象としたGNSSによる変位モニタリングを前提として、 GNSSの測位手法に『スタティック測位法』と『RTK測位法』を採用しています。 これら干渉測位手法では、2台以上の受信機を使用するため、計測対象に設置する計測点に加えて、 計測対象付近(1km以内の範囲を推奨)の不動地盤に基準点を1台は設置する必要があります。
② 各種誤差処理手法の適用によるGNSS計測精度の向上
GNSS計測では、衛星配置や上空視界、基線長(基準点と計測点間の距離)、気象条件、 マルチパス(建物などの地物による反射波)等の様々な誤差要因により計測値がバラつくため、 最も高精度なスタティック測位法でもmm級の変位判定は困難といえます。本サービスでは、スタティック測位法やRTK測位法で取得した計測データに対して、 それぞれの特徴を踏まえた各種誤差処理手法を適用しています。具体的には、スタティック測位法には『トレンドモデル』を、RTK測位法には『母集団移動平均法』と 『恒星日差分法』を組み合わせて適用することで変位検出精度を向上させ、 GNSSによるmm級の変位モニタリングを実現しています。
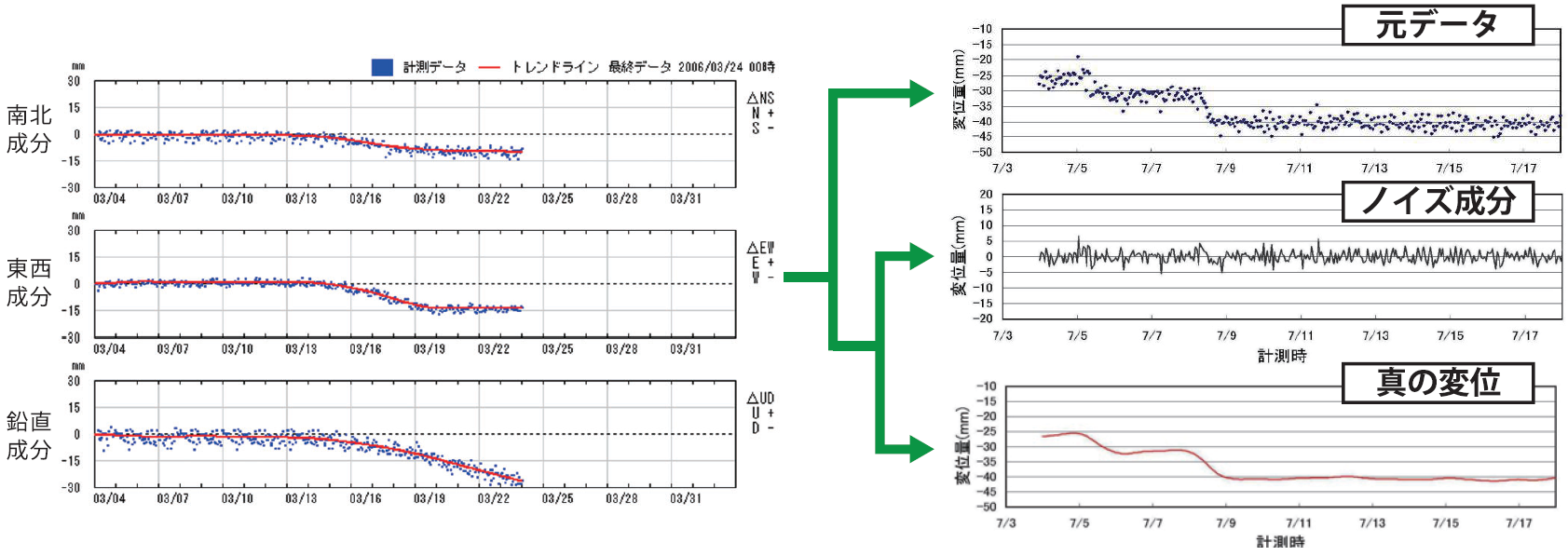
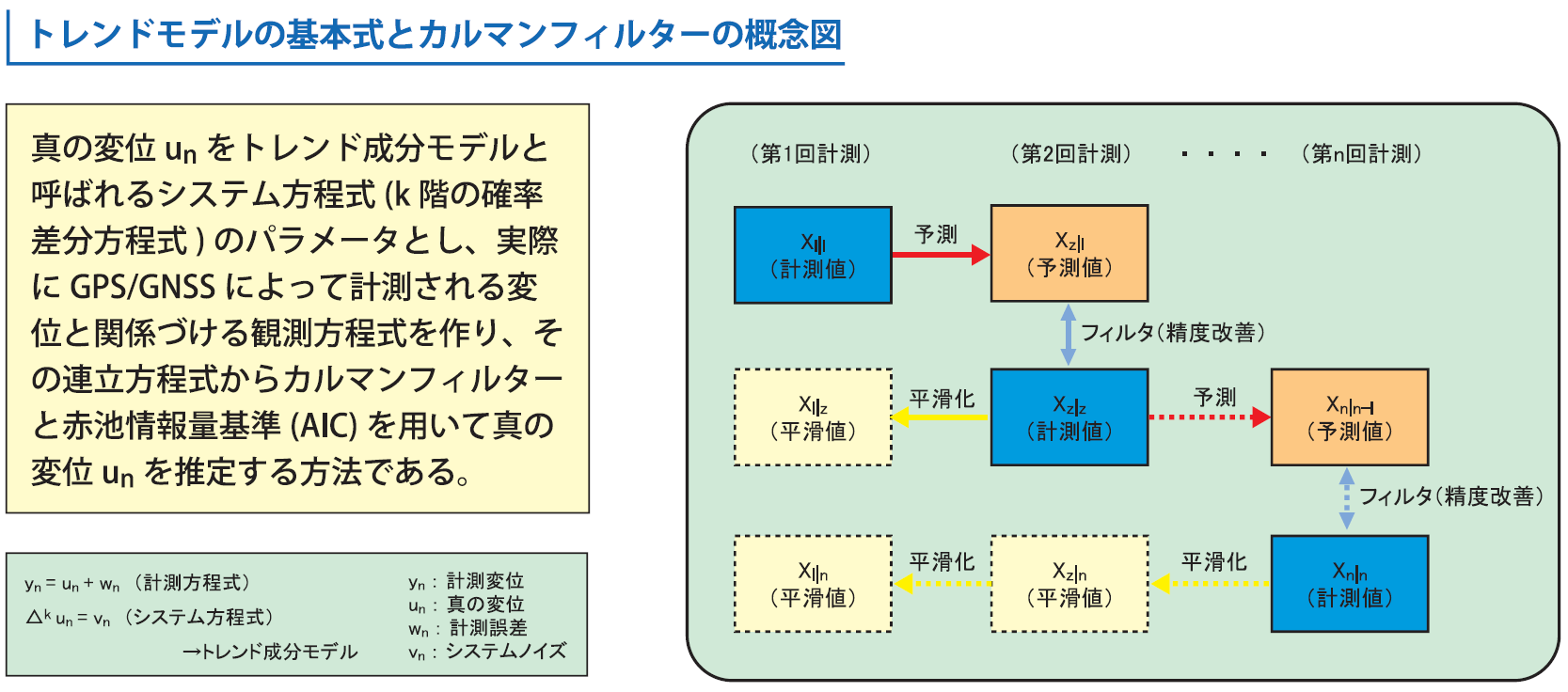
スタティック測位法+トレンドモデル
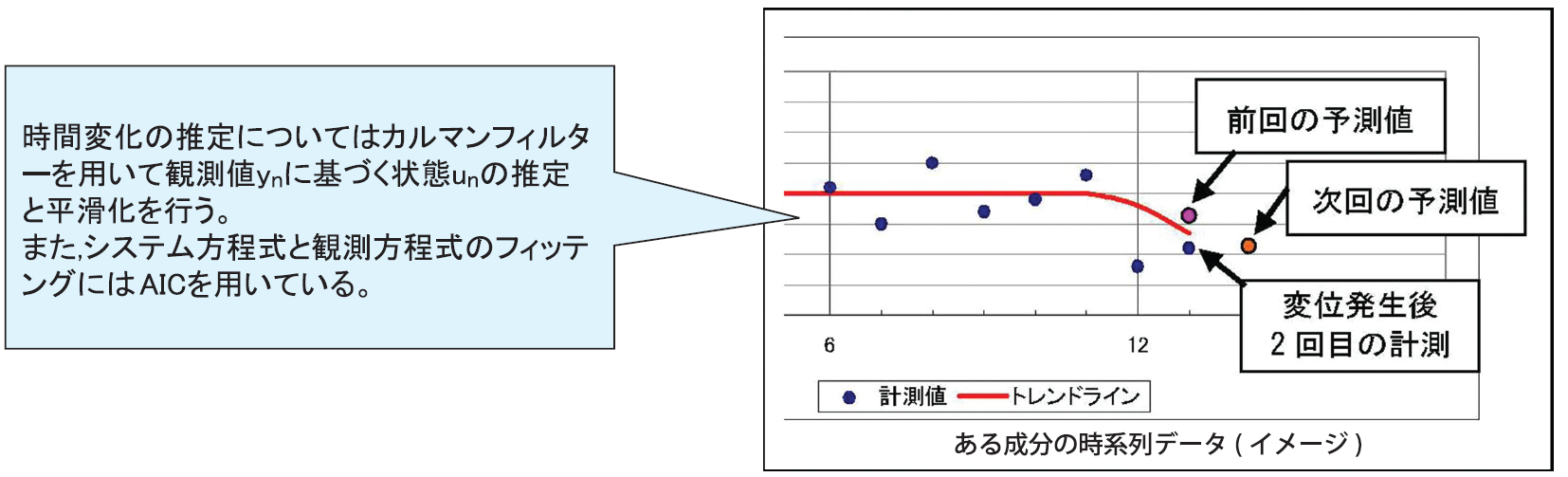
- スタティック測位法による計測値に対して、確率構造をもった時系列統計解析モデル「トレンドモデル」を適用することで、ノイズを含む計測値から真の変位挙動を推定します
- 計測値に含まれる誤差成分Wnと真の変位Unを分離することで、最高1~2mm程度の変位検出を可能とします
RTK測位法+母集団移動平均法
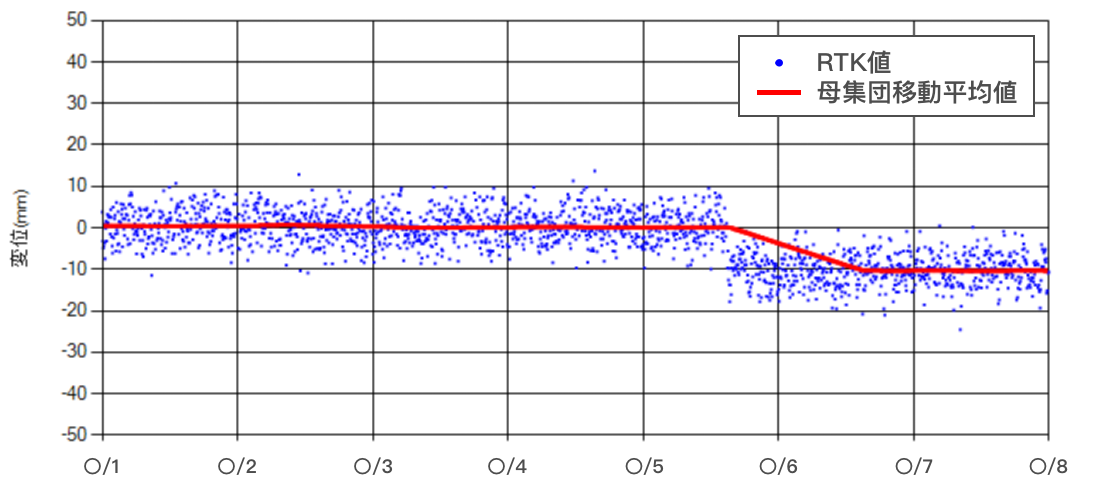
- 母集団移動平均法は、累積変位の把握に適した誤差処理手法で、変位検出精度の目安は水平成分で最高2~3mm/24時間です
- 衛星は1恒星日(23時間56分)の周期で同じ配置に戻るため、1恒星日分の計測値を母数として移動平均を算出することで衛星配置による誤差要因を除去することが可能です。一般的にRTK測位法の水平精度は2~3cm程度ですが、本手法を適用することで、水平精度2~3mm程度まで変位検出精度が向上します(高さ精度は水平精度の2倍程度低下します)
- 一方、移動平均の短所として、実際に変位が発生してから母数分(1恒星日=23時間56分)の時間遅れが生じるため、突発的な変位への応答性に乏しいことに留意する必要があります
RTK測位法+恒星日差分法
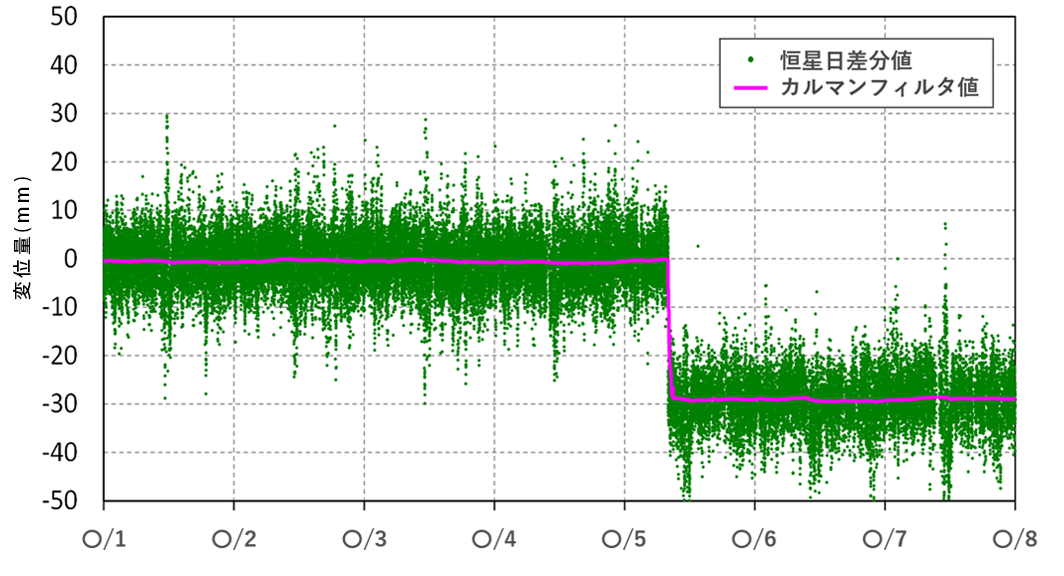
- 恒星日差分法は、突発変位の応答性が高い誤差処理手法で、変位検出精度の目安は水平成分で最高10mm/1時間です
- 衛星は1恒星日(23時間56分≒1日)の周期で同じ配置に戻るため、取得した計測値と1恒星日前の計測値の差分をとることで衛星配置による誤差要因を除去する方法です
- 母集団移動平均法に恒星日差分法を組み合わせることで、母集団移動平均法の短所である変位検出までの時間遅れを補完することができます
- 恒星日差分により、RTK測位による計測値よりもバラつきが小さくなり、突発的な変位検出に適しています。一方で、計測値が一時的に乱れた場合には恒星日差分値でもバラつきが大きくなることや、1恒星日毎の差分値のため累積変位は検出できないこと等に留意する必要があります
特徴
③ その他高精度化を実現する誤差処理技術
■ 対流圏遅延補正
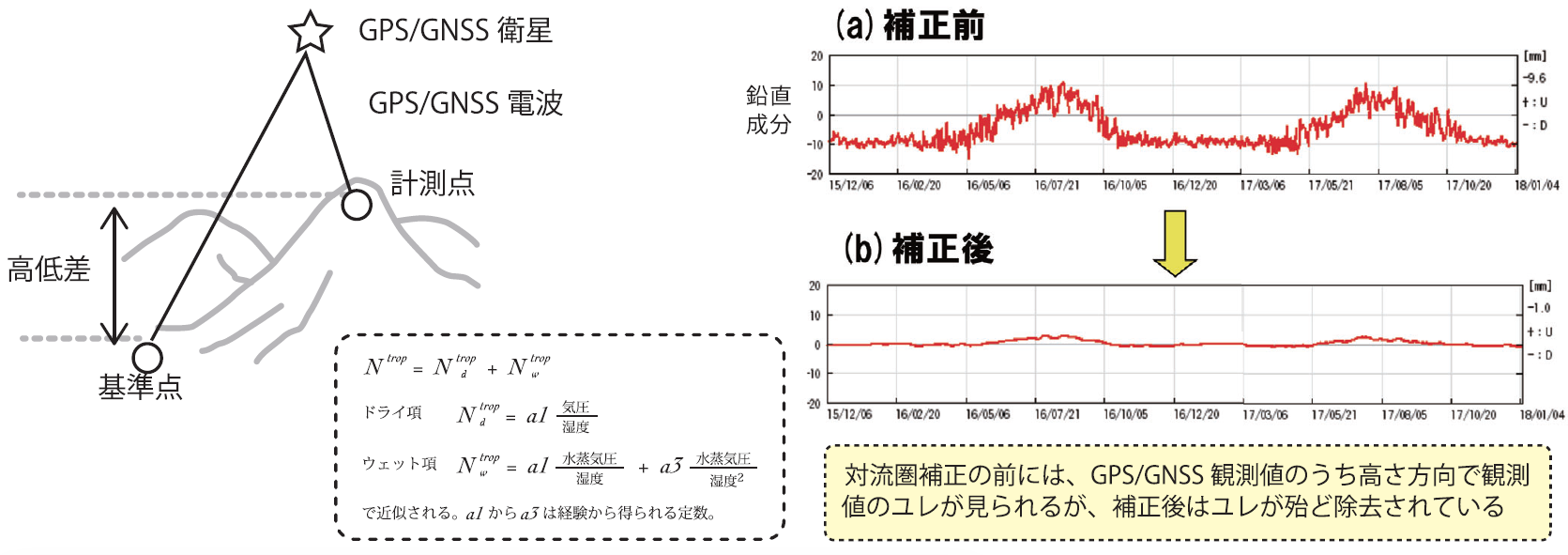
人工衛星の電波は、対流圏(高度0m~約11kmの大気の下層)を通ると屈折し、伝搬速度が遅くなります。 基準点と計測点の高低差が数十mを超えると、伝搬速度の遅延による差が無視できなくなり、誤差が大きくなるため、 対流圏遅延補正を行う必要があります。 下図は、鉛直成分の変位計測結果です。この上図(a)は対流圏遅延補正前の時系列グラフで、 下図(b)は対流圏遅延補正後の時系列グラフです。図中の上図(a)の対流圏遅延補正前のグラフでは、 夏期に隆起し冬期に沈下するような凹凸状の年周期の変動を示していますが、下図(b)の対流圏遅延補正後の結果ではこのような凹凸がほとんどなくなり、 ほぼ一定の値であることが明瞭に読み取れるようになっています。
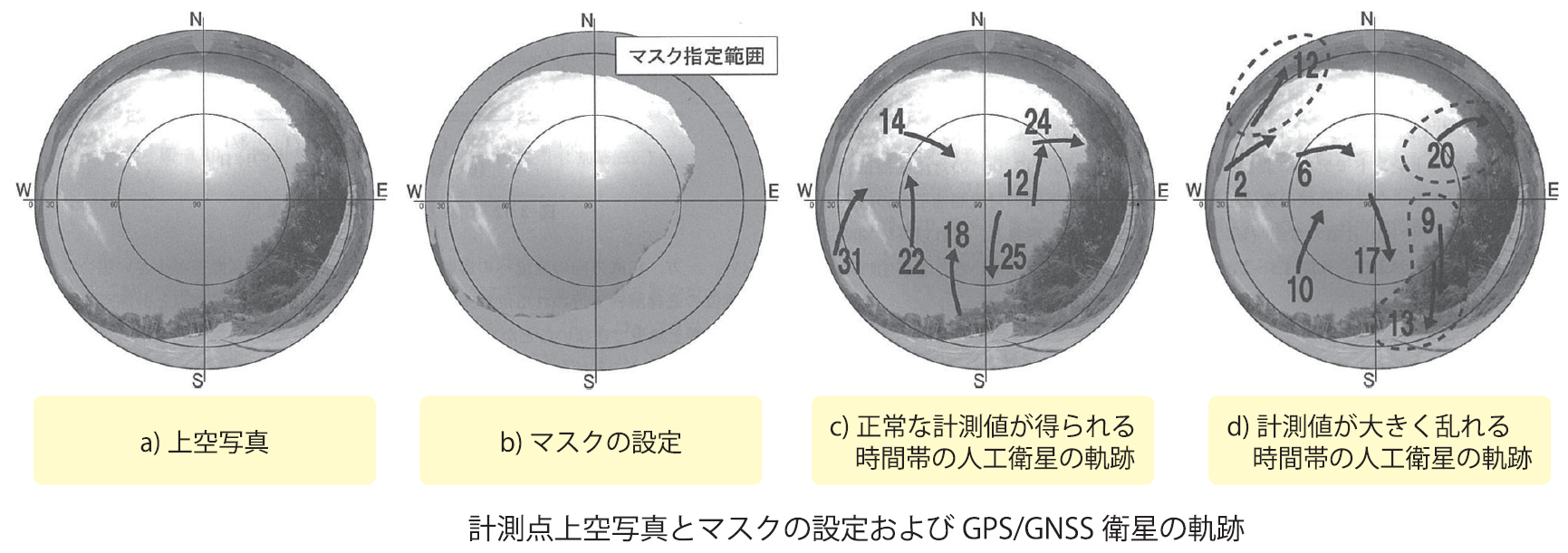
■ マスク処理
人工衛星とGPS/GNSSアンテナとの間に樹木などの障害物があると、受信電波に乱れが生じ、計測精度が悪化することがあります。 対策としては、障害物の存在する環境下での計測を避けるために上空視界が良好な位置を選んで計測する、 あるいは、伐採等により障害物を排除することが推奨されますが、用地上の制約などから必ずしもそのような対策が取れるとは限りません。 ただし、衛星から上空障害物の隙間を経由して受信した電波を用いずに基線解析を実施する「マスク処理」を適用することである程度の精度改善が期待できます。 下図a)は北西向き切土斜面に設置したアンテナ上空の写真です。下図c)に正常な計測値が得られた時間帯の人工衛星の軌跡を、 下図d)に計測値が大きく乱れた時間帯の人工衛星の軌跡を示します。c)の正常値が得られる時間帯では人工衛星も開けた上空に位置するのに対し、 d)の計測値が大きく乱れる時間帯では、人工衛星(9, 12, 13, 20)が樹木の背後に隠れているために電波の伝播遅延が生じ、計測値が大きく乱れたと推察されます。 マスク処理では、樹木の背後に隠れた人工衛星からの電波を基線解析に用いないよう、b)に示す障害物の範囲にマスク領域を設定して基線解析を行います。
活用事例
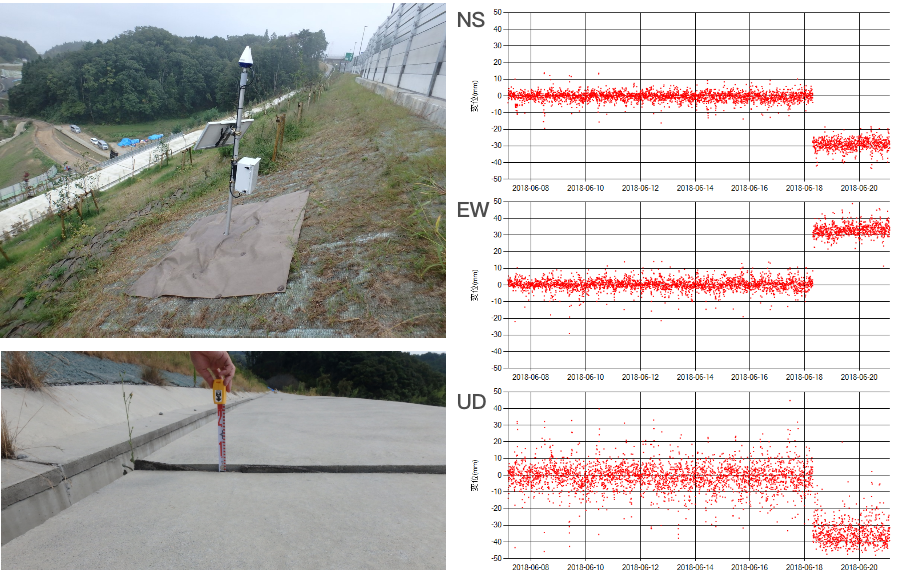
高規格道路のり面で地震後の変状をGNSSで観測し迅速な対応による早期復旧を実現
開通直後の高規格道路のり面4地区にRTK-GNSSセンサを設置、 のり面挙動の計測中に大規模地震が発生し、2地区で約30mmの変位を計測しました。 変位を検出したのり面に対しすぐに緊急点検を実施しましたが、部分的な変状にとどまり、 のり面自体の構造に問題がないことと、その後GNSSでは累積する変位が認められなかったことから、 その後の交通運用に支障がないことが早期に判断できました。