G-Trend
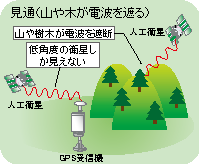
- GPS衛星の状態
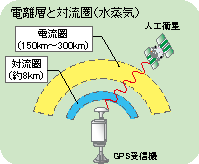
- 電離層・対流圏の影響
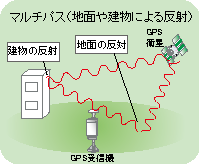
- マルチパス
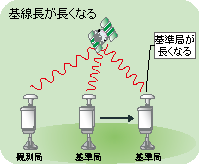
- 基線長
G−Trendでは、計測データを、真の変位を示す「トレンド成分」と、計測誤差よりなる「ノイズ成分」に分離します。
解析には、カルマンフィルタのアルゴリズムを用い平滑化処理※を実施しますので、安定した斜面変位の抽出が可能になります。
下図の青い点はGPS計測データ、赤い線(=トレンドライン)は時系列解析結果を示しています。計測データが追加されるたびに、逐次、解析を行い、真の斜面変位をグラフに描きます。トレンドモデルにより1〜2mm程度の変位を検知することが可能です。
● 計測データ− トレンドライン
※松田浩朗,安立 寛,西村好恵,清水則一(2002):GPSによる斜面変位計測結果の平滑化処理法と
変位計測予測手法の実用性の検証,No.715/Ⅲ-60, pp.333-343,土木学会論文集